Un défi technique à relever pour améliorer la programmation de nos robots suiveur de ligne. Ce défi, ce sont les élèves de groupe 6°/5° Option robotique qui se sont penché dessus avec l’aide de certains élèves du groupe 4°/3° Option Robotique.
Un élève ingénieur de l’INSA Lyon les accompagne dans cette investigation à mi-chemin entre Technologie et Mathématiques puisqu’il est question ici d’utiliser le principe de la proportionnalité pour améliorer la performance du code de programmation du robot.
Capteur de couleur Lego
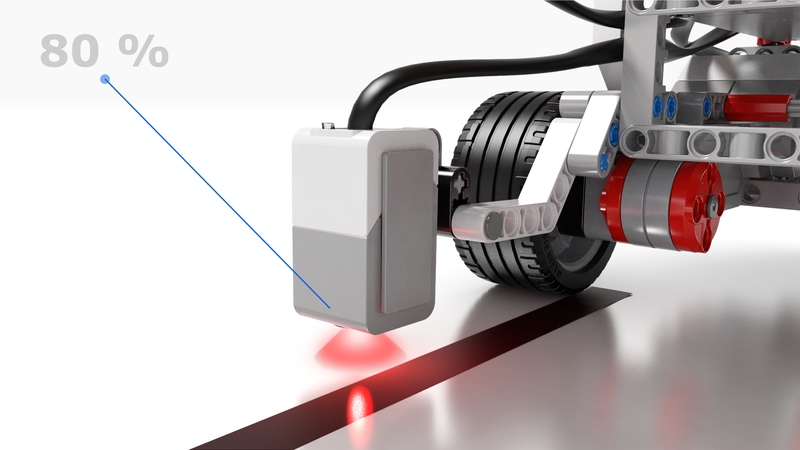
Un Capteur de couleur utilisé en Mode Intensité de la lumière réfléchie
Quand le capteur de couleur est en mode Intensité de la lumière réfléchie, une lumière rouge s’allume sur la face avant du capteur. Si le capteur est proche d’une surface, cette lumière rouge va se réfléchir sur l’objet et être détectée par le capteur. On va l’utiliser pour mesurer les nuances de couleur d’une surface car les teintes plus sombres renverront moins la lumière rouge vers le capteur.
Le capteur de couleur identifie l’intensité de la lumière pénétrant dans le capteur. L’intensité lumineuse est mesurée en pourcentage de 0 à 100, 0 indiquant une zone très sombre et 100 une zone très claire. »
surface blanche = 80% de lumière réfléchie
surface noire = 20% de lumière réfléchie
Programmation des capteurs / moteurs
La problématique a été partiellement résolue par 3 élèves de 4° mardi 24 janvier après-midi ….et ce sont les élèves de 6°/5° qui vont devoir maintant finaliser le travail avec les conseils de leur tuteur élève-ingénieur et du professeur de technologie/robotique.
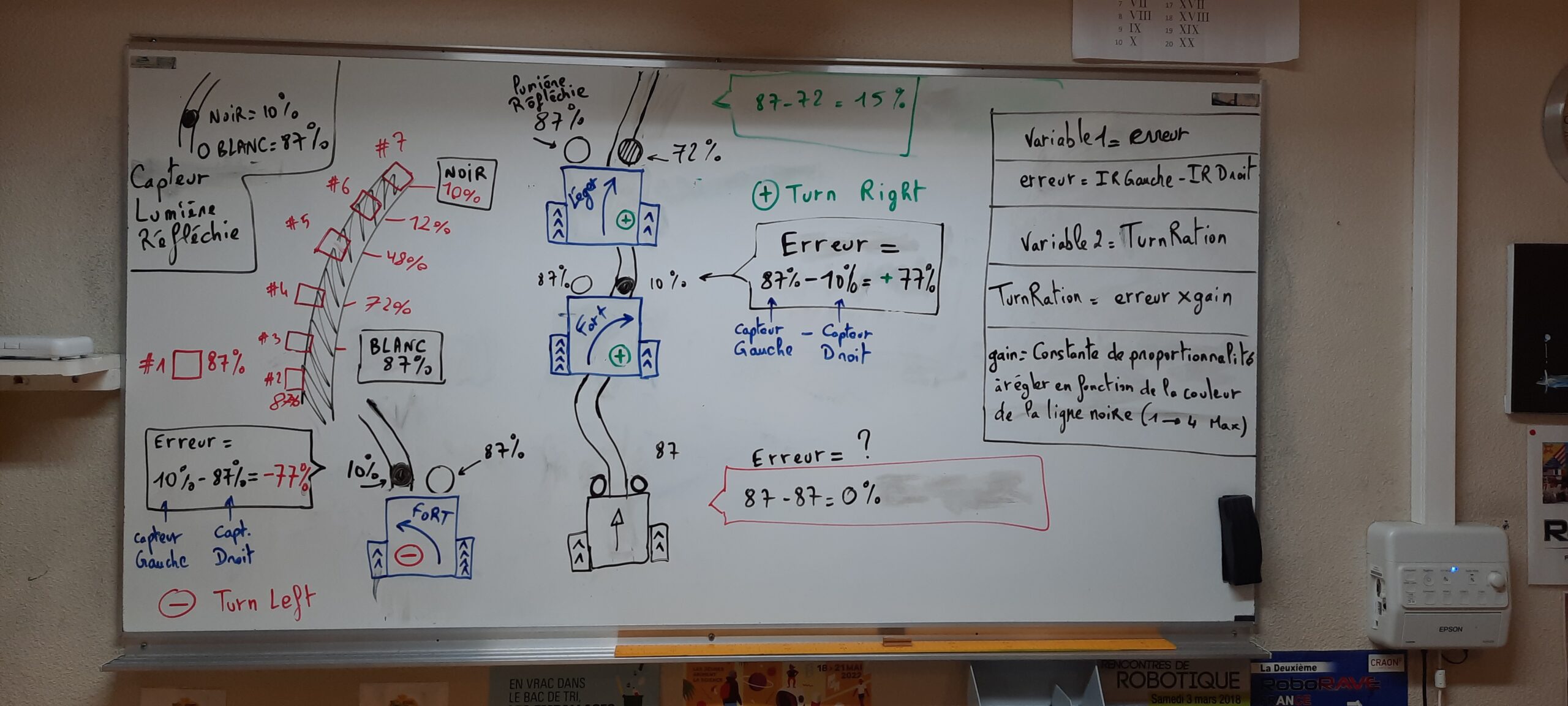
Algorithme à construire
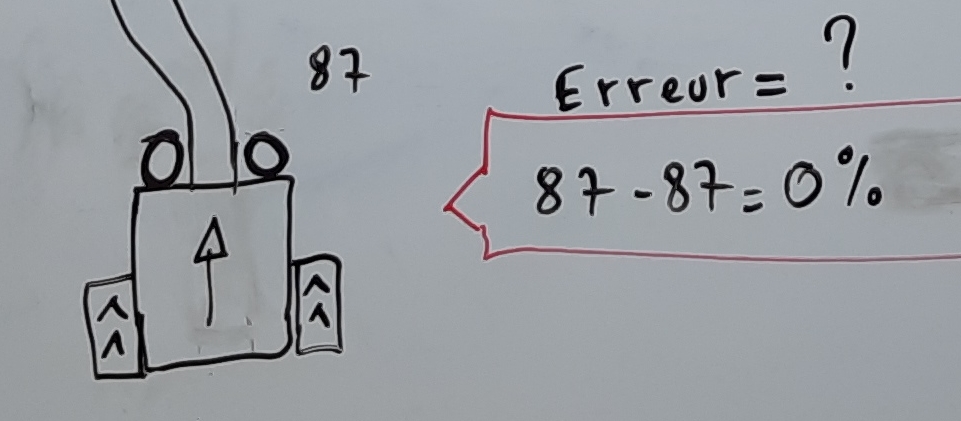
Si les deux capteurs sont sur le blanc, le robot avance tout droit
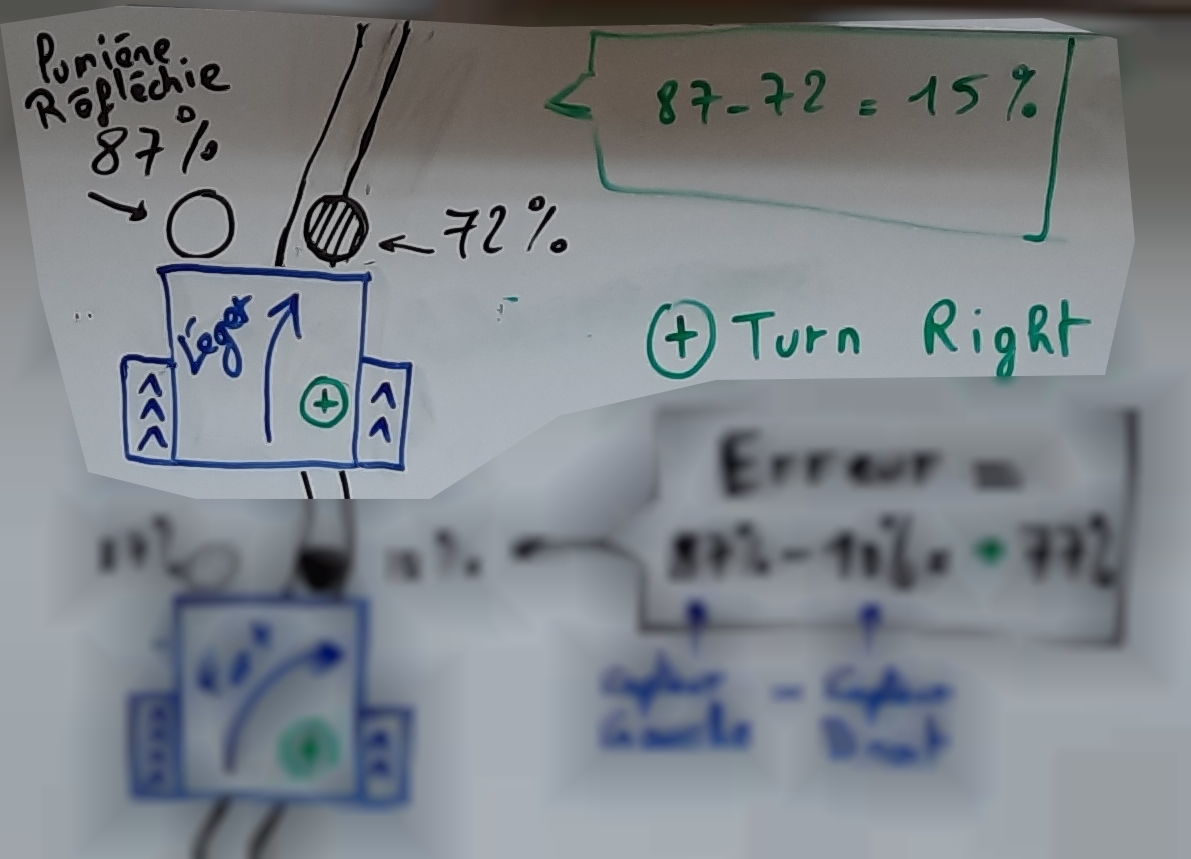
Plus le capteur gauche s’approche de la ligne noire ….plus il doit tourner FORT à gauche pour s’en éloigner.
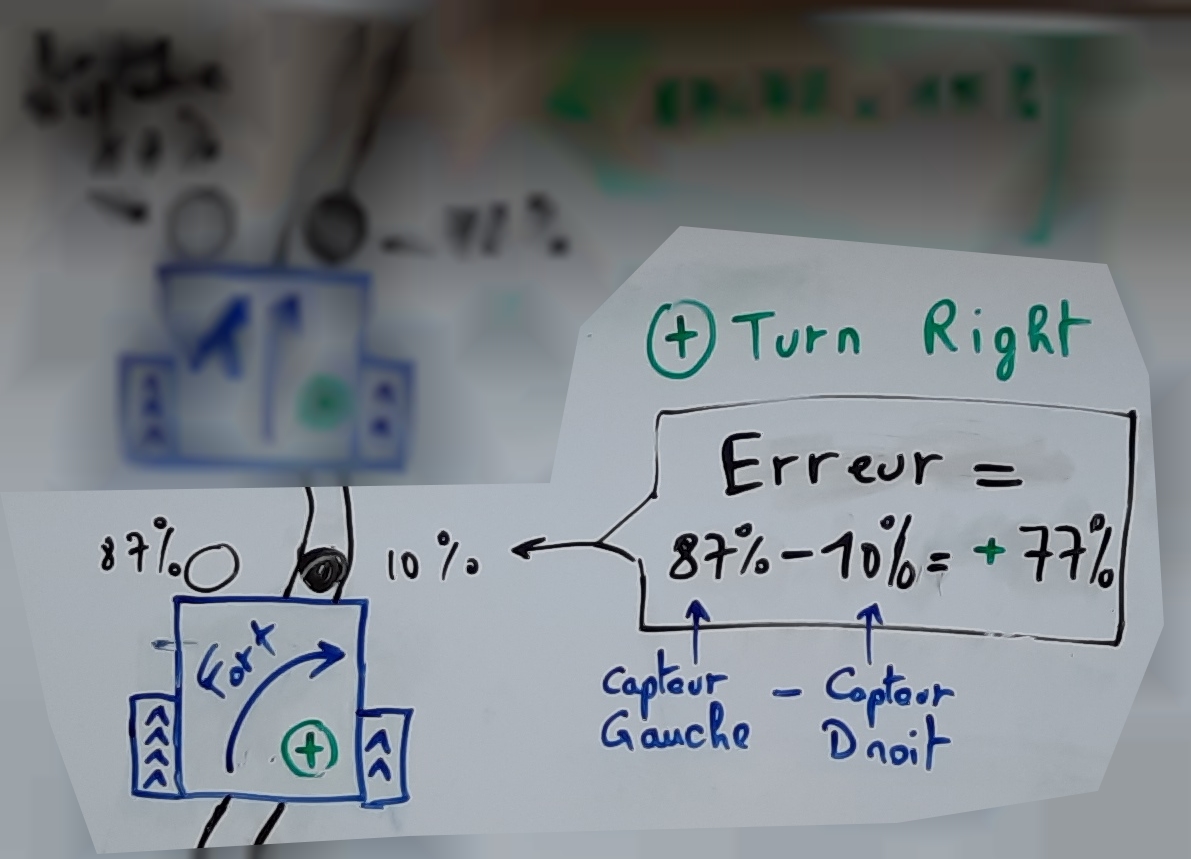
Plus le capteur droit s’approche de la ligne noire… plus il doit tourner FORT à droite pour s’en éloigner.
Le taux de virage est donc PROPORTIONNEL à l’éloignement du capteur par rapport à la ligne
capteur droit est sur la ligne noire ALORS il faudra tourner très fort à DROITE
Le capteur droit est à moitié sur la ligne noire ALORS il faudra tourner légèrement à droite
les deux capteurs sont sur le blanc, la différence des deux mesures est nulle, le robot ne tourne plus, il avance tout droit.
Objectif : terminer avant les vacances d'hiver !
Le travail expérimental sera terminé avant les prochaines vacances de février et vous découvrirez les résultats de nos « petits ingénieurs » dans moins de 2 semaines…si tout va bien…
MOUSSI Ouissem
LE COLLEGE COLETTE
23 rue Colette
69800 Saint-Priest
Tel : 04 78 20 19 72
ce.0691497c@ac-lyon.fr